
A la base c’est une idée qui m’est venue, je voulais concevoir l’outil pensant qu’il n’existait pas, puis en commençant à faire des croquis et chercher les pièces adéquats, j’ai découvert que ça existait déjà, et en plus pas cher, donc je l’ai acheté. Voici le récit de cette réflexion et de ce test.
Je commence mon histoire avec un besoin rencontré au boulot. Les Géomètre font des mesures en topographie dans des espaces souvent ouverts permettant d’utiliser des GPS qui sont maintenant fiables. Si le réseau est mauvais, on peut utiliser une station optique qui permet de lever très précisément des points dans un rayon de plusieurs centaines de mètres, et si besoin on peut aussi travailler a l’ancienne avec la chaîne d’arpentage.
Mais dans l’activité du Géomètre on retrouve aussi des travaux de relevés en intérieur, ou le GPS est inutile, et ou la station pas rentable en temps de mise en place comme en investissement. La précision recherchée est de l’ordre du cm, pas besoin d’un matériel aussi lourd et précis qu’une station. Ce qui est fait aujourd’hui c’est de placer une station dans un couloir distribuant plusieurs pièces, permettant de relever très précisément des points et des orientations dans les pièces qui sont autour. Le Géomètre utilise ensuite un distance-mètre (laser) pour prendre les mesures précises du reste des pièces, et les reporte sur un croquis.
C’est très long et très fastidieux car le distance-mètre ne mesure qu’une valeur dans une direction. La manœuvre favorise beaucoup les risques d’erreur.

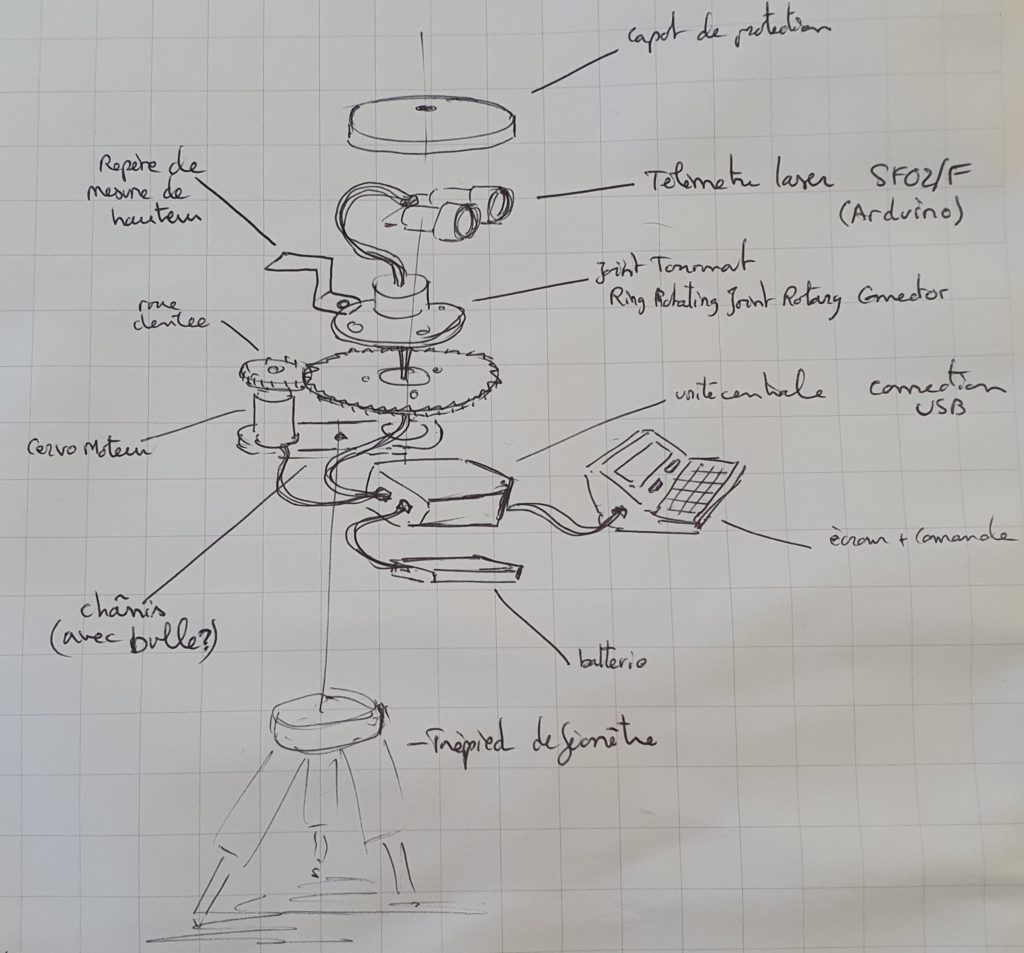
Voila donc d’ou m’est venue l’idée de faire des mesures autrement. Je me suis dit, ce qui serait top c’est un distance-mètre couplé à un moteur le faisant tourner sur un plan horizontal. Si le distance-mètre a la capacité d’enregistrer chaque mesure associée à l’angle du moteur, c’est gagné on peut reconstruire la pièce dans le logiciel en faisant un changement de coordonnées. J’ai fais un croquis, et trouvé des pièces adéquats. On peut trouver tout ceci maintenant avec l’avènement des modules complémentaires Raspberry Pi par exemple. Un module laser coûte entre 50 et 100 euros pour avoir une precision acceptable. On peut le coupler avec un servomoteur avec feedback permettant de connaître sa position angulaire.
Je comptait brancher ceci a une carte Arduino ou Raspberry Pi et un module de commande tactile pour le rentre autonome, comme ceci :
Mais a ce moment la, je me suis dit, quand même ce serait vraiment bizarre que je sois le premier à y penser. J’ai donc cherché des lasers rotatifs à 360 degrés déjà existants. Et j’ai trouvé !
Il s’avère que ce type de laser a été développé depuis quelques années déjà, surtout pour la robotique, pour faire des programmes par apprentissage par exemple et sécuriser une zone autour d’un robot.
Bref, voici le joujou que j’ai choisi, directement connecté a un pc portable, tout est compris avec pour le connecter et extraire les données.

Je terminerai ce test lorsque j’aurais reçu le matériel. Pour un investissement de 100€ j’espère arriver à le faire fonctionner, et surtout à exporter les données dans Autocad. A+
EDIT : partie 2 du test disponible après réception du matériel
1 thought on “Test scanner laser partie 1”